特殊環境向け多関節ロボット開発の取り組みについて
2015年7月27日
当社(株式会社スギノマシン)は、原子炉の予防保全工事用に高圧水を噴射し残留応力を改善する(ウォータジェットピーニング:WJP)多関節ロボット(6軸同時制御)の技術を応用し、WJP以外の廃炉作業など特殊環境で使用できるロボットの開発へ取り組んでおります。
その一環として、日本原子力開発機構と日立GEニュークリア・エナジーの2社との共同で、東京電力株式会社福島第一原子力発電所の廃炉作業における「炉内構造物及び燃料デブリの取り出し工程」に適用可能なレーザー加工法に関する技術開発の実施を決めたことを、7月15日に日本原子力開発機構が発表されました。
3社共同開発のうち、当社におけるロボット開発の経緯、ロボットの特徴、今後の可能性および、共同研究契約の締結内容についてお知らせいたします。
1.特殊環境向け多関節ロボット開発の経緯
 当社は長年、石油化学プラント関係機器や原子力関係機器の補修・予防保全に携わり、各施設で活躍するロボット(人に代わって作業を行う装置、機械)を数多く開発、納入してきました。
当社は長年、石油化学プラント関係機器や原子力関係機器の補修・予防保全に携わり、各施設で活躍するロボット(人に代わって作業を行う装置、機械)を数多く開発、納入してきました。
福島第一原子力発電所の廃炉作業には、人が容易に近づけない領域での作業が必須であり、人の代わりに作業を行うロボットが必要とされています。
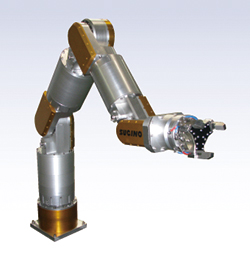
そこで、当社は原子炉の予防保全工事用に高圧水を噴射し残留応力を改善する(ウォータジェットピーニング:WJP)多関節ロボット(6軸同時制御)の技術を応用し、WJP以外の廃炉作業など特殊環境で使用できる新しい多関節ロボットの開発を行いました。(右画像)
2.特 徴
- 開発したロボットは狭い領域での姿勢自由度を確保するためにロボットの肘のひねりを追加した7軸構成としました。
肘の姿勢を最適化し、6軸ロボットではできない姿勢を実現して作業範囲を拡げました。 - 操作盤にはオフラインシュミレータと3Dリアルタイムモニタリングを標準装備しました。ロボットの各関節の位置情報を基にリアルタイムに3D化し、遠隔操作する操作者の視覚情報を補完し、操作負荷を低減しました。
- ロボットの各軸のセンサはレゾルバを使用し、耐放射線対応としました。
- 防水機能を強化し、水深30mでの使用を可能としました。
- 先端ツールの駆動用としてロボットの先端にエア供給源を装備しました。
先端ツールの組換えにより多用途な作業に対応可能としました。
3.今後の可能性について
今回開発したロボットがさらに進化すべく、下記項目に注力し開発を進めていきます。
- 状況把握能力の向上
- 操作性の向上
- 先端ツールの強化
当社は、震災事故後の福島原子力発電所の原子炉建屋内部の超高圧水除染ロボット、放射線量測定ロボットの納入実績があります。今後は福島復旧、並びに運転開始から40年を経過する原子力発電所の廃炉に向けた原子炉解体技術の開発とその装置化を実施していきます。今回開発したロボットはその基礎的な要素であると考えています。
当社技術センターには、遠隔操作技術の開発に長く携わってきた技術者と石油化学プラントや各種発電所の大きさを模擬できる高さ60mのテストタワーがあり、様々な操作テストを実現できます。
技術センターで開発されたロボットを含む装置が福島第一原子力発電所の解体に使用されることにより、福島復興に貢献して参ります。
また、本装置は、7月15日から17日にかけて科学技術館展示ホール(東京)で開催された環境放射能対策・廃棄物処理国際展「RADIEX(ラディックス)2015」に出展し、多くのお客様に興味を持っていただきました。
4.「日本原子力研究開発機構、日立GEニュークリア・エナジー、スギノマシンのレーザー技術開発に関する共同研究契約」締結について
国立研究開発法人日本原子力研究開発機構(理事長:児玉 敏雄/以下、原子力機構)、日立GEニュークリア・エナジー株式会社(取締役社長:武原 秀俊)、株式会社スギノマシン(代表取締役社長:杉野 太加良)は、7月15日、東京電力株式会社福島第一原子力発電所(以下、1F)の廃炉作業における「炉内構造物及び燃料デブリの取り出し工程」に適用可能なレーザー加工法に関する技術開発について共同研究契約を締結しました。
本契約により、3社は、原子力機構が楢葉町に整備中の楢葉遠隔技術開発センターを今後活用することも検討しつつ、1Fの廃炉作業に向けた研究協力を開始します。
当社は、燃料デブリの取り出しに必要な遠隔操作ロボットの操作性をさらに向上させるための部分試作と実機構想を担当します。
目的:1Fの燃料デブリ取り出し等の廃炉作業へのレーザー技術の適用拡大を見据えたレーザー加工法に関する基盤的研究を行います。
主な研究内容は以下の通りです。
(1)新型工法の開発
(2)炉内環境切断工法の開発
(3)厚板鋼材切断工法の開発
期間:平成27年7月15日~平成29年3月31日

技術相談や仕様、価格、カタログ送付依頼など、お問合せはこちらです。お気軽にお問合せください。
