クローラ式小型作業ロボット Crawler Type Multi-Joint Robot
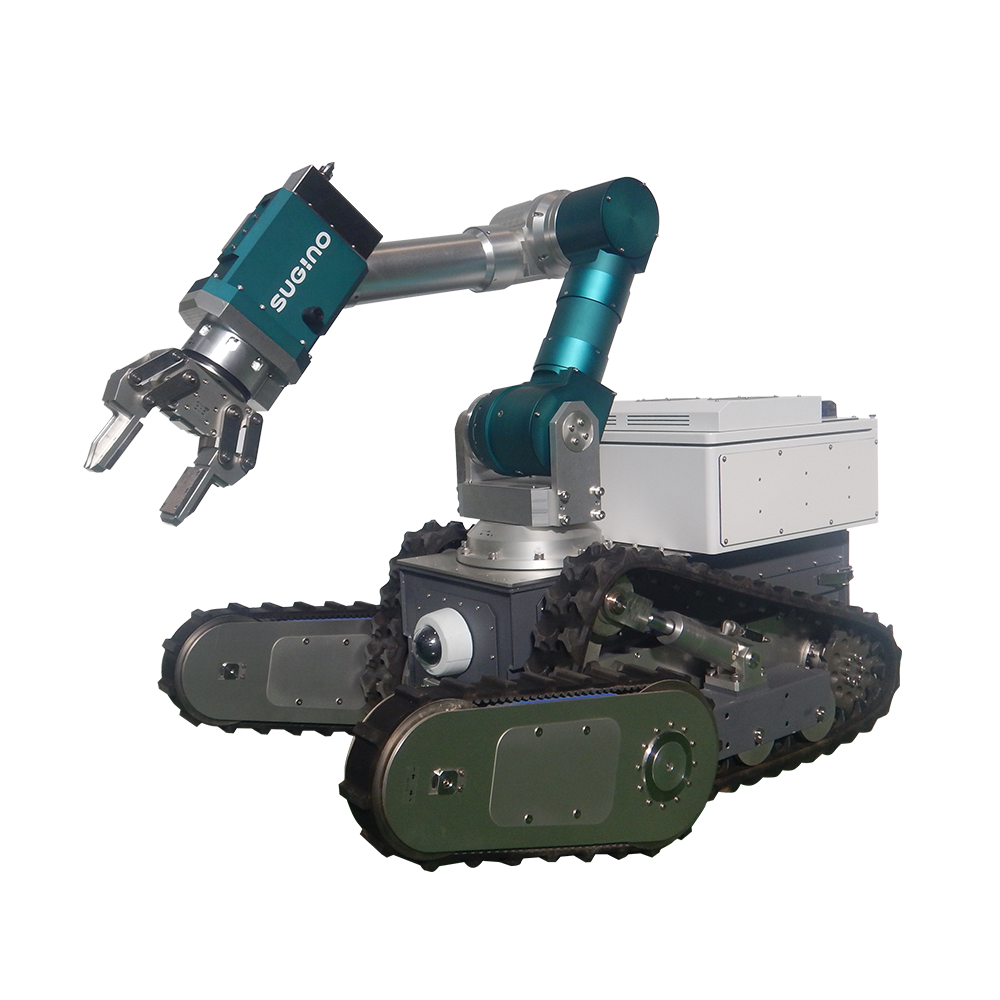
Crawler Type Multi-Joint Robot
クローラタイプの移動機構に多関節アームを搭載した、狭い空間での移動・作業が可能な小型ロボットです。
商品紹介動画
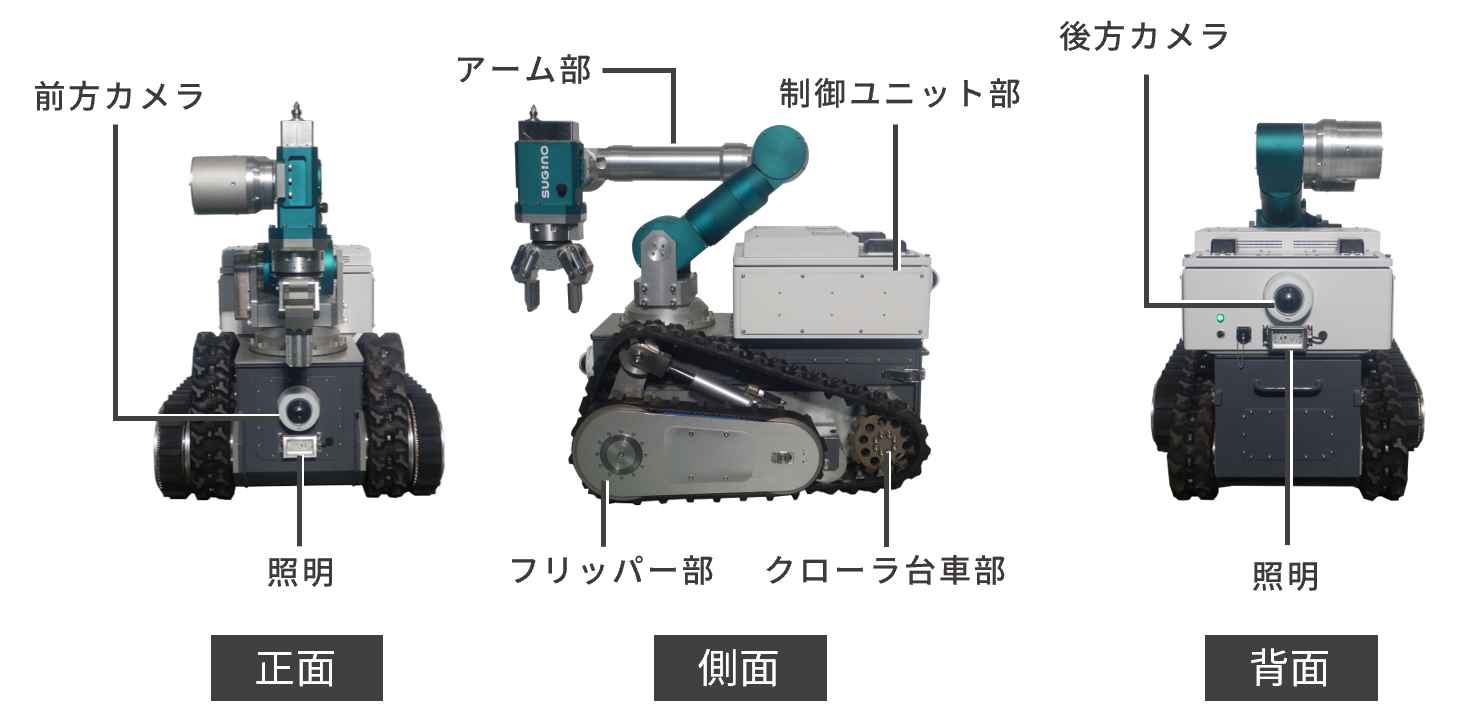
主要装備品
特長
狭隘部・特殊環境下での遠隔作業が可能
- 幅80㎝、高さ144㎝とコンパクト
- 制御通信に無線LANを使用。
バッテリー搭載で、完全無線化
悪環境での高い動作性
- クローラ台車の前輪にフリッパーを搭載し、重作業時の転倒防止と20㎝の段差乗り越えが可能
- 転倒状態からロボット自身で起き上がることが可能
- アーム旋回部にはトルク保護機構を搭載し、装置転倒時のアーム破損を軽減。
高い作業性
- アーム5軸+ハンド1軸で自由な動きが可能
- 最大可搬重量100kgで重量物に対応
(アーム伸長時:50kg)AC100V対応
操作しやすい
- アームが3軸同時制御のため、ハンドの先端教示で容易にアームを操作可能
- コントローラにジョイスティックを使用し、直感的に操作速度を調節可能
仕様
| 外観寸法 | 幅800mm×奥行1,390mm×高さ1,440mm(クローラおよびアーム収納時) | |
| 質量 | 約394kg(バッテリー含む) | |
| 最高走行速度 | 0.93km/h | |
| 駆動方式 | 電動(リチウムイオンバッテリー方式または有線給電方式の選択が可能) | |
| 連続稼働時間 | 4時間(平地走行時) | |
| 制御通信方式 | 無線LAN (IEEE 802.11)+有線LAN | |
| 堰乗越え | 高さ200mm | |
| アーム仕様 | アーム長 | 約1,500mm |
| 軸数 | 5軸(アーム部)+ 1軸(ハンド部) | |
| 可搬質量 | 最大100kg (アーム屈曲時:100kg、アーム伸長時:50kg) | |
| 最大把持力 | 1960N | |
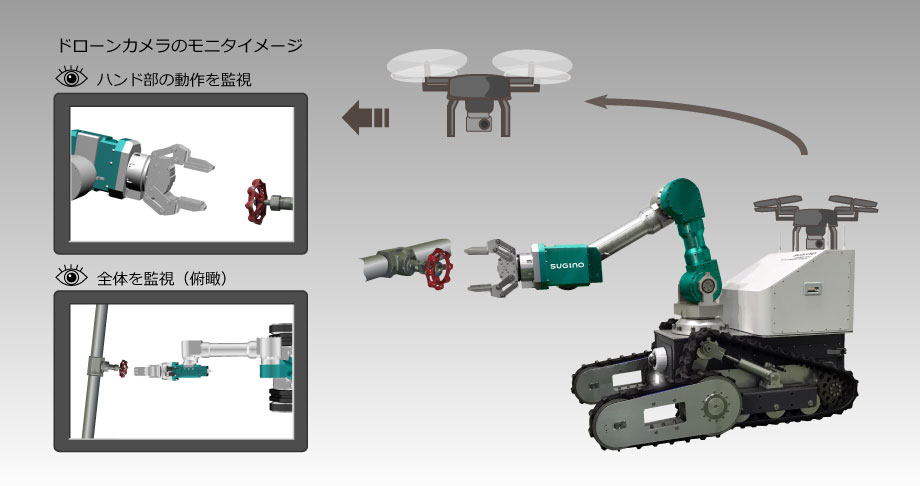
用途・機能例
オプションで各種ツールを組み合わせることも可能です。あらゆる用途に対応します。
ドローンと組み合わせることで、カメラ映像の死角を無くし、アーム操作者の負担を軽減します。(※開発中)