水中7軸同時制御型多関節ロボット

水中7軸同時制御型多関節ロボット
水中環境での使用が可能な7軸同時制御ロボットです。
先端は任意のツールに取替えが可能で、耐放射線性を有し、水深30mまでの対応が可能です。
また、先端反力は300Nまで耐えられます。
作業方法、作業対象、作業環境にあわせて最適な仕様の装置をご提案し、製作、提供しております。
実現させたい装置がございましたら、お気軽にご相談ください。
特長
①7軸同時制御
少ない移動量で作業ができ、干渉回避しやすい姿勢での動作が可能。
②3Dオフラインシミュレータ
オフラインシミュレータとリアルタイムモニタリングを3Dで行える機能を標準装備。
ロボットの状態を視覚的に把握することができるため、オペレータの負荷を低減し、
遠隔作業においては監視カメラの死角になる場所での状況把握に有効です。
また、干渉しそうになると警告を発し、装置を停止させることができますので、
複数台のロボットを連携して遠隔共同作業を行うことも可能です。
③耐放射線対応(集積線量10^5Gy)
レゾルバを使用しており、耐放射線対応となっています。
④水深30mで使用可能
水中での使用を想定した構造となっております。
⑤用途に応じて各種ヘッド及び先端ツールを取替え可能
作業、用途に応じた先端ツールを選択、取り付けることが可能です。

主な仕様
| ① | アーム長さ | 1400mm |
| ② | 外形寸法 | φ260mm |
| ③ | アーム質量 | 180kg |
| ④ | 先端反力 | 300N |
主な適用例
ガントリタイプの搬送装置の先端に多関節ロボットを取り付け、広範囲の対象物を精度良く作業することが可能です。
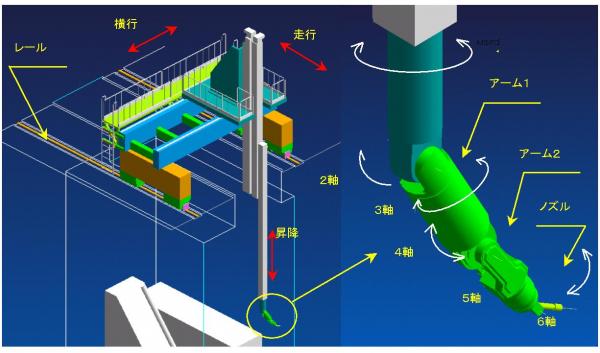
大型装置の先端ツールとしての組合せ例/大型ガントリユニットの先端に取付け
【その他の適用例】
① 除染、切断、応力改善に使用するウォータージェットピーニング用高圧水噴射ノズルを組付けての施工
② 超音波探傷ヘッドを組付けての亀裂有無の検査
③ 放電加工(EDM)ヘッドを組付けての補修作業
・・・この他、レーザーヘッド、把持ハンド、研磨ヘッド、監視カメラ等を組付けることも可能です。