超音波自動探傷システム
超音波自動探傷
システム
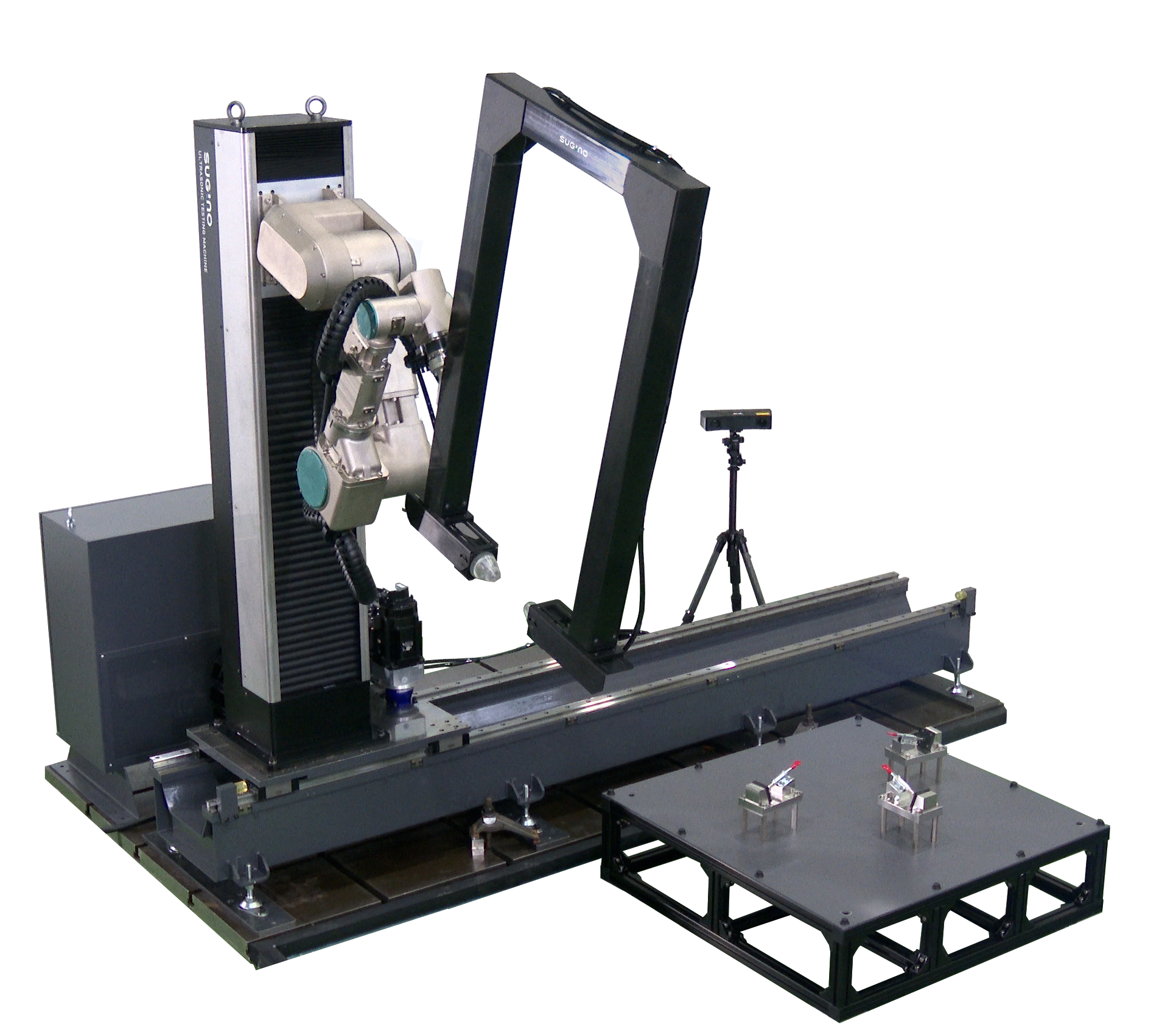
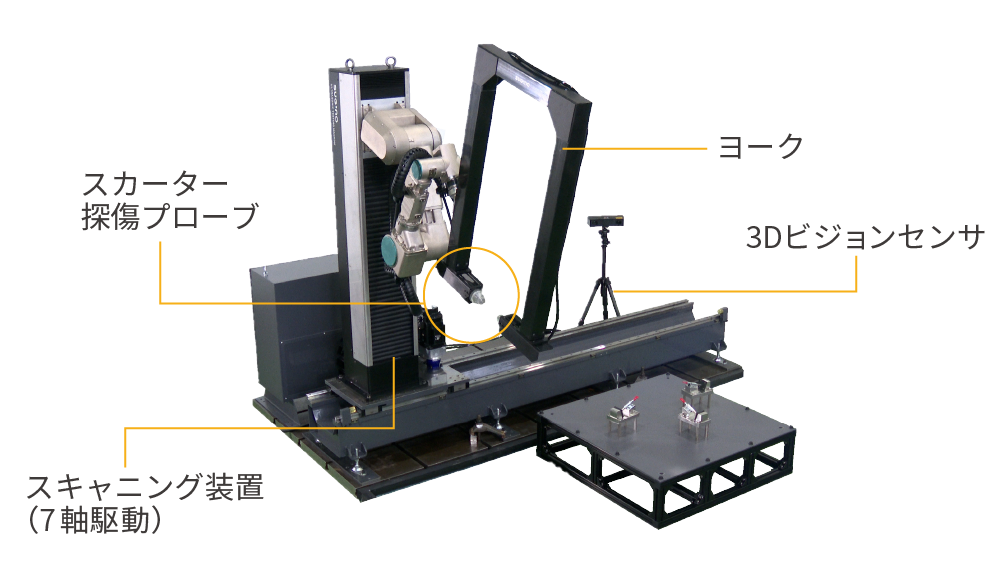
複雑な3次元形状のワークに対し、ヨークを用いた水噴射方式の透過法によりワークの内部を自動探傷する装置です。
オフラインティーチングやワーク設置誤差の自動調整等、セットアップ時間の短縮機能も搭載可能です。
特長
ヨークを用いた水噴射方式の透過法で、対象物の内部の欠陥を検出します。
・多関節ロボットで複雑な3次元形状の対象物へ倣い走査可能!
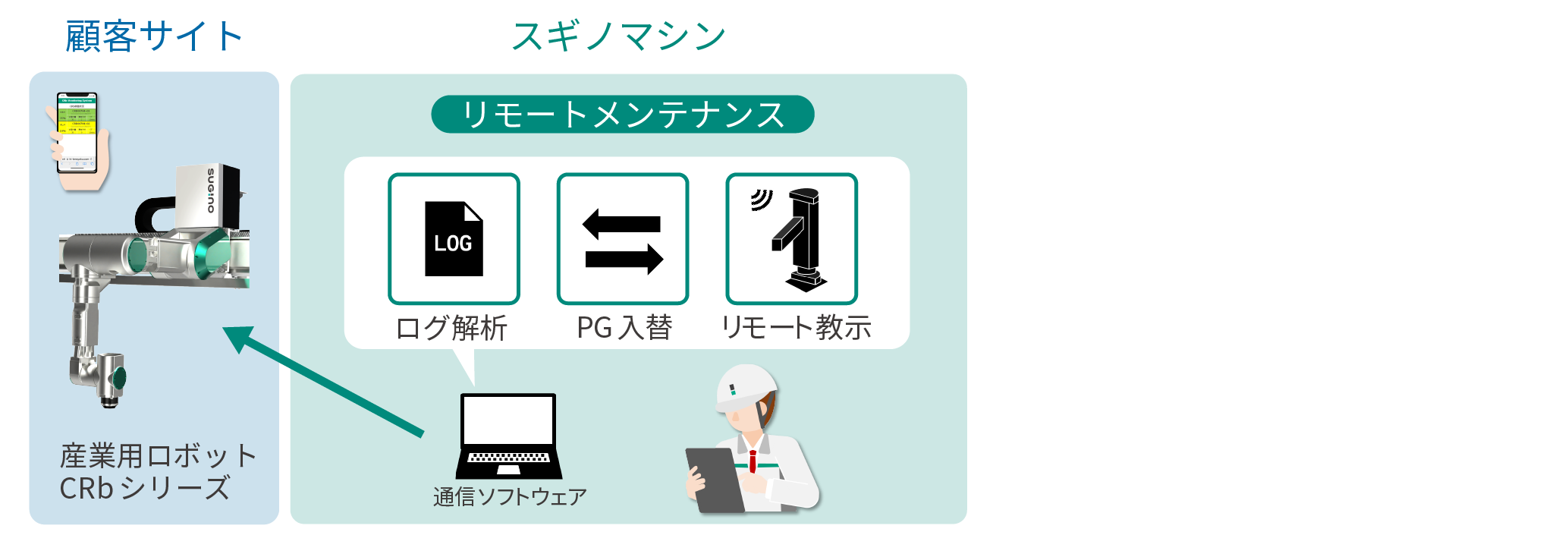
・リモートメンテナンス対応可能!
・ロボットシミュレーションソフト『CROROROS』+3Dビジョンセンサのティーチングレスなシステムによりセットアップ時間を大幅短縮!
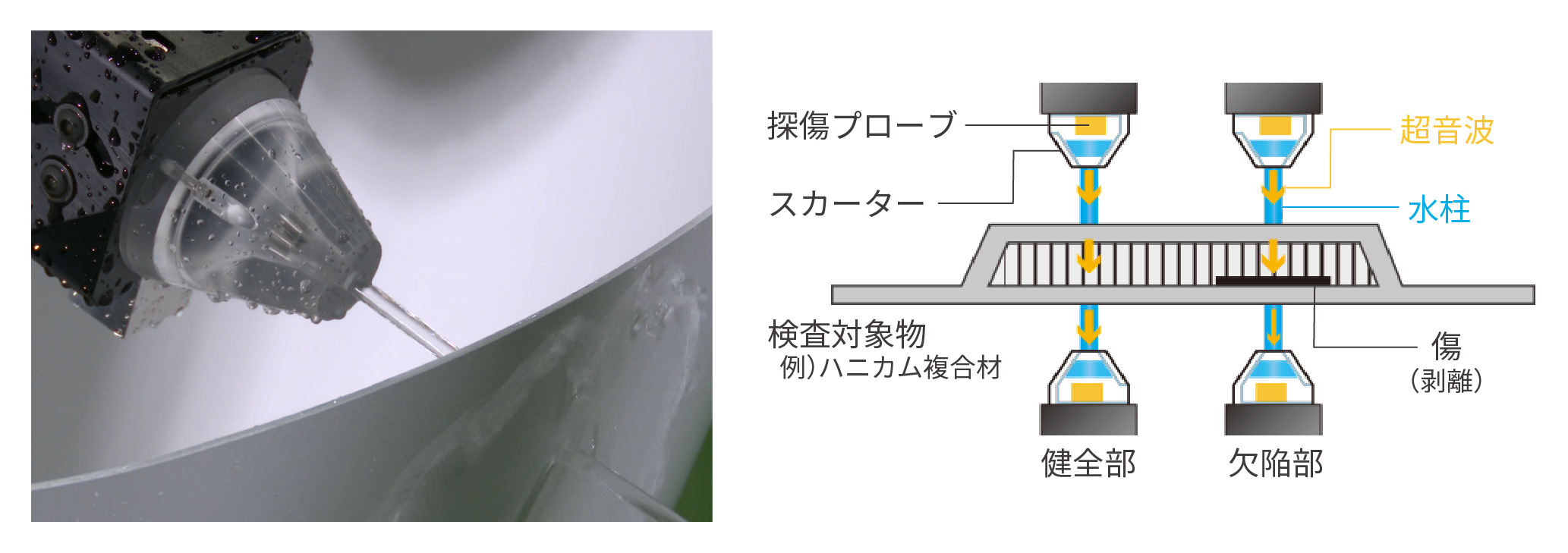
複合材に最適な水噴射方式の透過法
スカーターから水を噴射し、水柱内を通して超音波を検査対象物に伝搬させる探傷法。
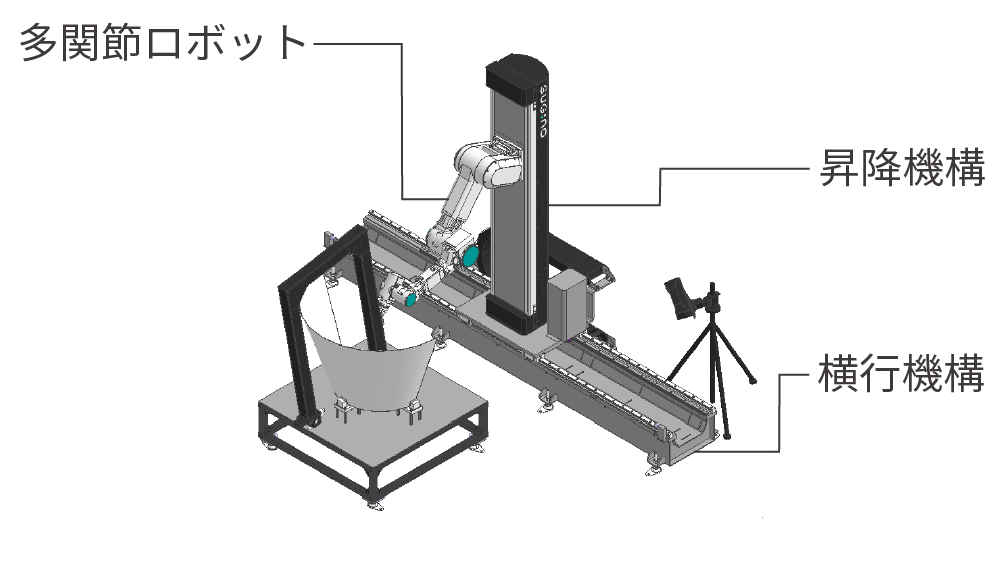
3次元形状の対象物へ倣い走査可能
多関節ロボットによりプローブ角度の自由度を高め、直動軸により高精度なプローブ走査を実現。
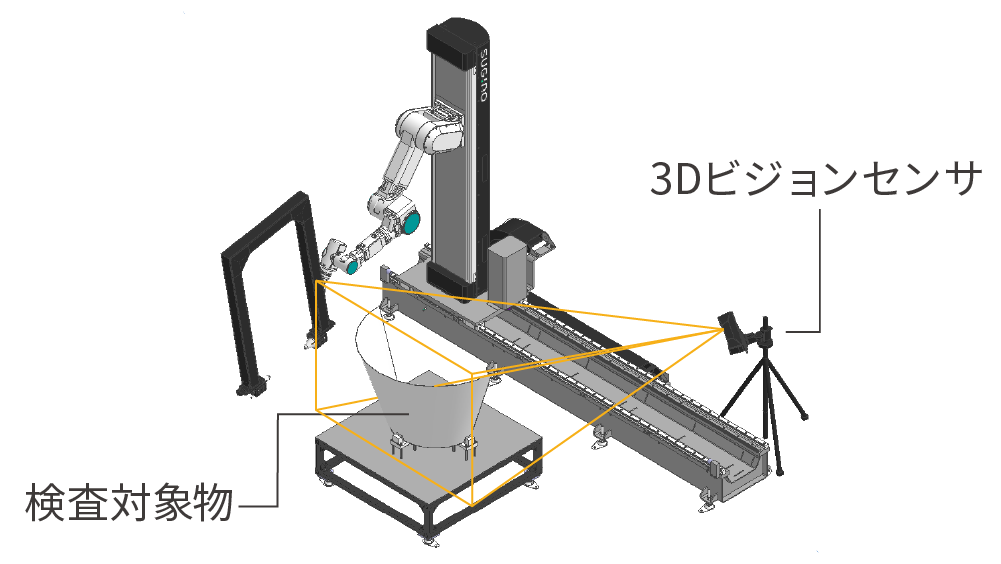
オフラインティーチング×誤差補正3Dカメラ
①『CROROROS』で探傷動作を簡単に作成
② 3Dビジョンセンサで検査対象物の設置誤差補正
⇒トータルでティーチングレスなシステムを提供

リモートメンテナンスサービス
超音波自動探傷システム 動画
仕様
| 探傷方法 | ヨークを用いた水噴射方式の透過法 |
| スキャニング装置寸法 | W3,000mm×L2,000mm×H2,200mm |
| 質量 | 約600kg |
| 駆動速度 | ~300mm/sec(探傷動作時) |
| 駆動軸構成 | 回転:5軸(アーム部)、直進:2軸(横行、昇降) |
| アーム長 | 1,000mm |
| 駆動ストローク | 昇降:1,000mm、横行:2,100mm ※ご要望に応じてストローク変更可能 |
| 探傷器、探傷プローブ | お客様のご要望に応じて選定 |