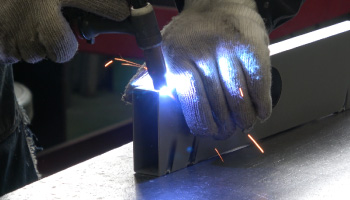
ロボット-輪郭動作-バリ取り
CRb適用例 DEBURRING
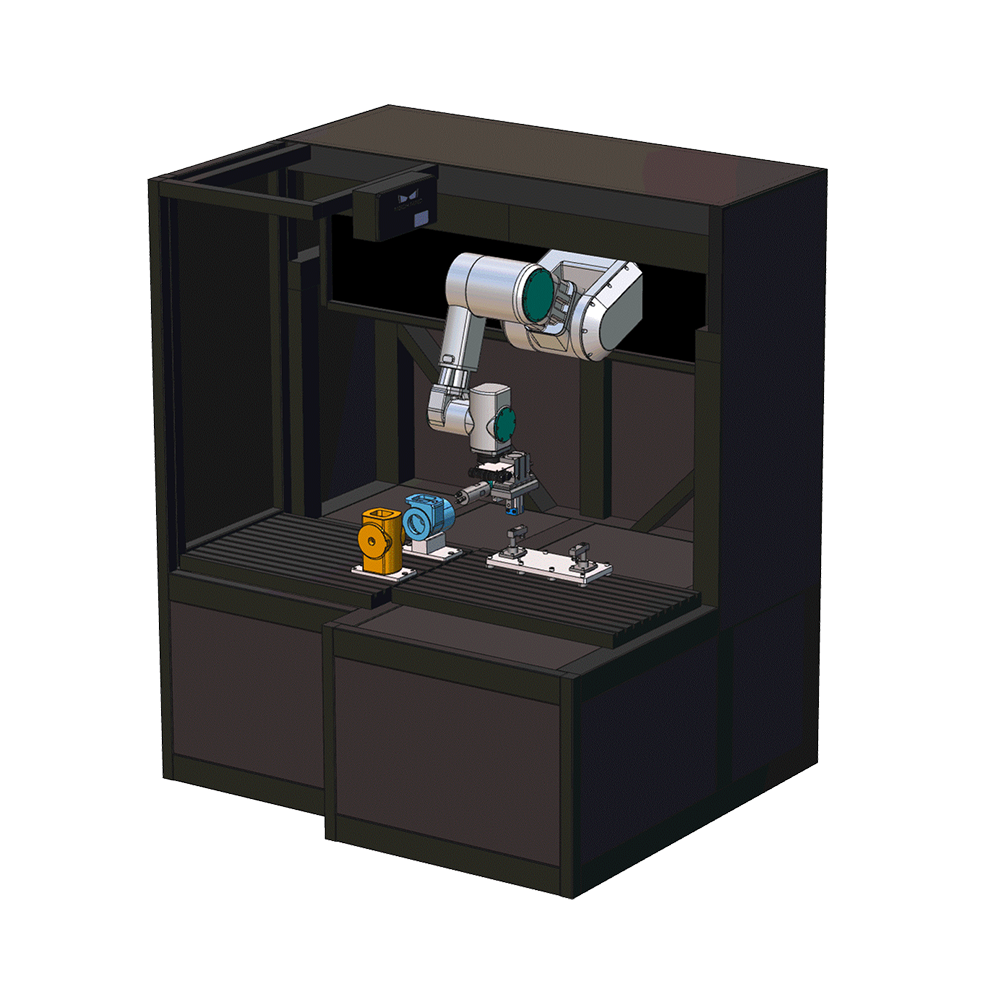
5軸ローダ型CRbを使った、輪郭動作(バリ取り)の自動化モジュール例です。
省スペースなモジュールです。
紹介動画
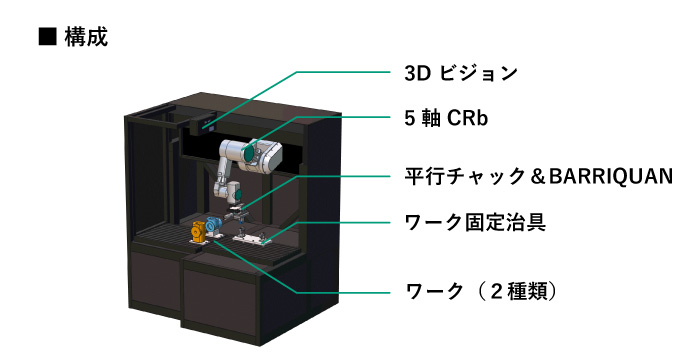
モジュール構成
5軸ローダ型CRb「CRb020H506(リーチ長625mm)」を使ったバリ取りロボットモジュールです。
ハンド部にはバリ取り用スピンドルモータと平行チャックの二つを備え、ツールチェンジャを使用することなく搬送とバリ取りを1台のロボットで実施できます。
ワーク搬入部には3Dビジョンセンサ(オプション)を備えており、ワークの識別および位置を認識することで、任意の向きに置かれたワークに合わせてハンドの向きを補正してワークを把持します。



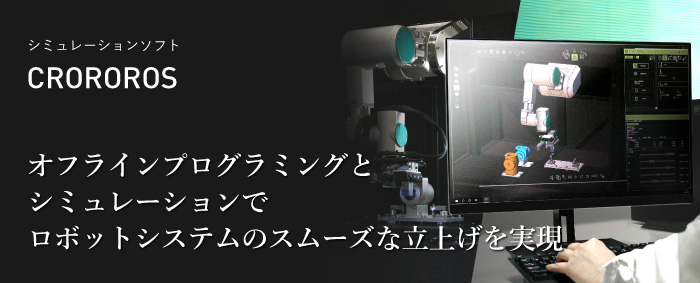
シミュレーションソフトで装置立上げ時間を短縮!
ロボットシミュレーションソフトを利用して、オフラインティーチング(バーチャル空間でのティーチング)を行うことにより、実際に装置を稼働させる前に動作経路やサイクルタイムなどを確認できます。
事前検証することで、装置の立上げ時間短縮や危険作業を少なくすることができます。
スギノマシンでは、シミュレーションソフト「CROROROS」を合わせてご提供しています。