【加工事例】段差のあるアルミ鋳物の面取り【ロボットバリ取り#07】

ワーク情報
ワーク情報
材質
- AC4C
前加工
- フライス加工
バリの種類
- 切削バリ
加工情報
加工内容
- フライス加工後のエッジ面取りC0.5指示
現在の加工方法
- 平ヤスリ・丸ヤスリを使って手作業
合格判断基準
- C面がC0.5以内に収まっていること
- 手で触ってわかるバリが残存していないこと

課題
課題① : 生産数が多いため作業者の負担が大きく、バリの取り忘れが発生する
課題② : 作業者の熟練度で品質に差ができる
バリ取り診断
目的・目標値
目的
- バリ取り品質の安定化
- 作業者の負荷軽減
目標値
- 面取り量:C0.5以内
- サイクルタイム:10秒/個(手作業と同等程度)
自動化を困難にさせる要因
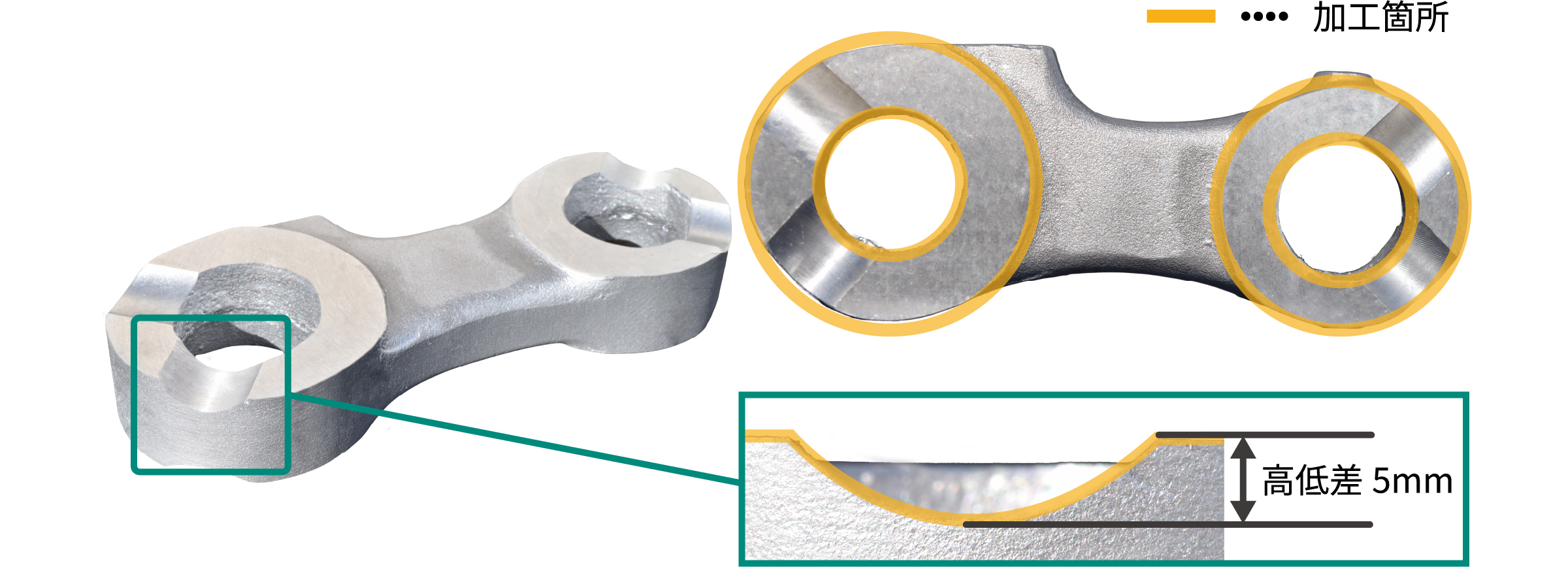
要因1 : 形状
加工箇所に高低差5mmある切り欠きがあるため、3次元的で複雑な動作が必要になる
要因2 : 材質
アルミ鋳物で寸法や形状にばらつきが生じるため、面取り量が安定しない
選定機種・加工条件
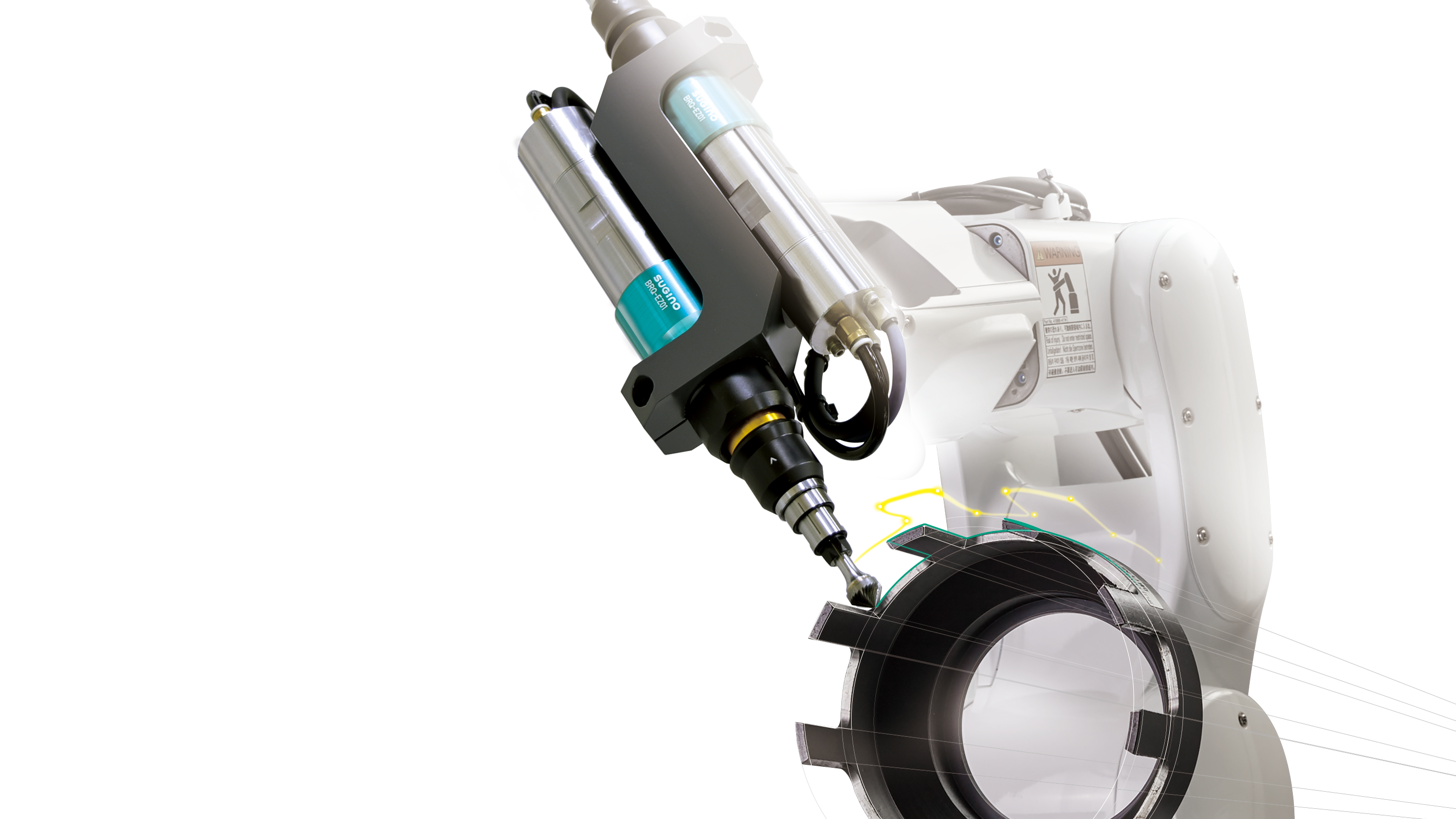
選定機種
使用工具
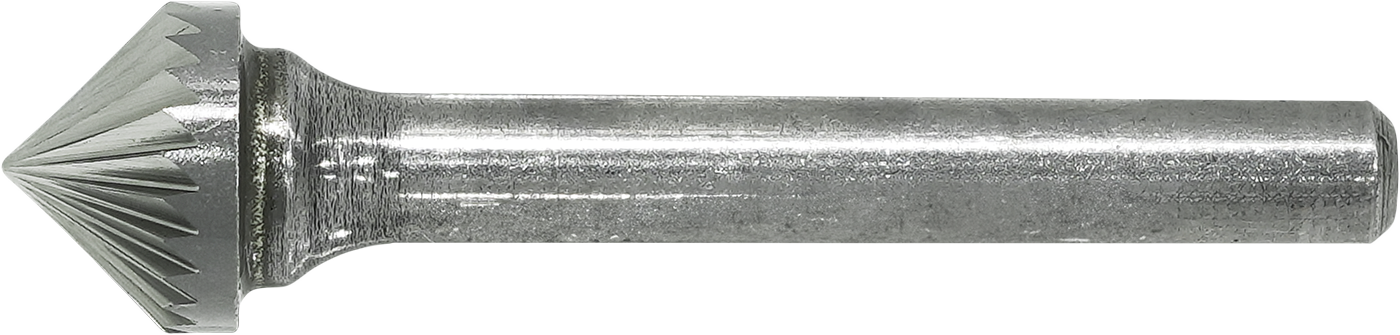
種類 : 超硬ロータリーバー
形状 : 90°円錐型
刃先 : ストレート刃/シングルカット
直径 : Φ12.7
使用ロボット
機種 : 垂直多関節ロボット
可搬質量 : 7kg
加工条件
| 回転速度 | 8,000min-1 |
| 送り速度 | 6,000mm/min |
| スプリング | 弱スプリング |
| 押し込み量 | 8mm |
加工レポート
加工結果
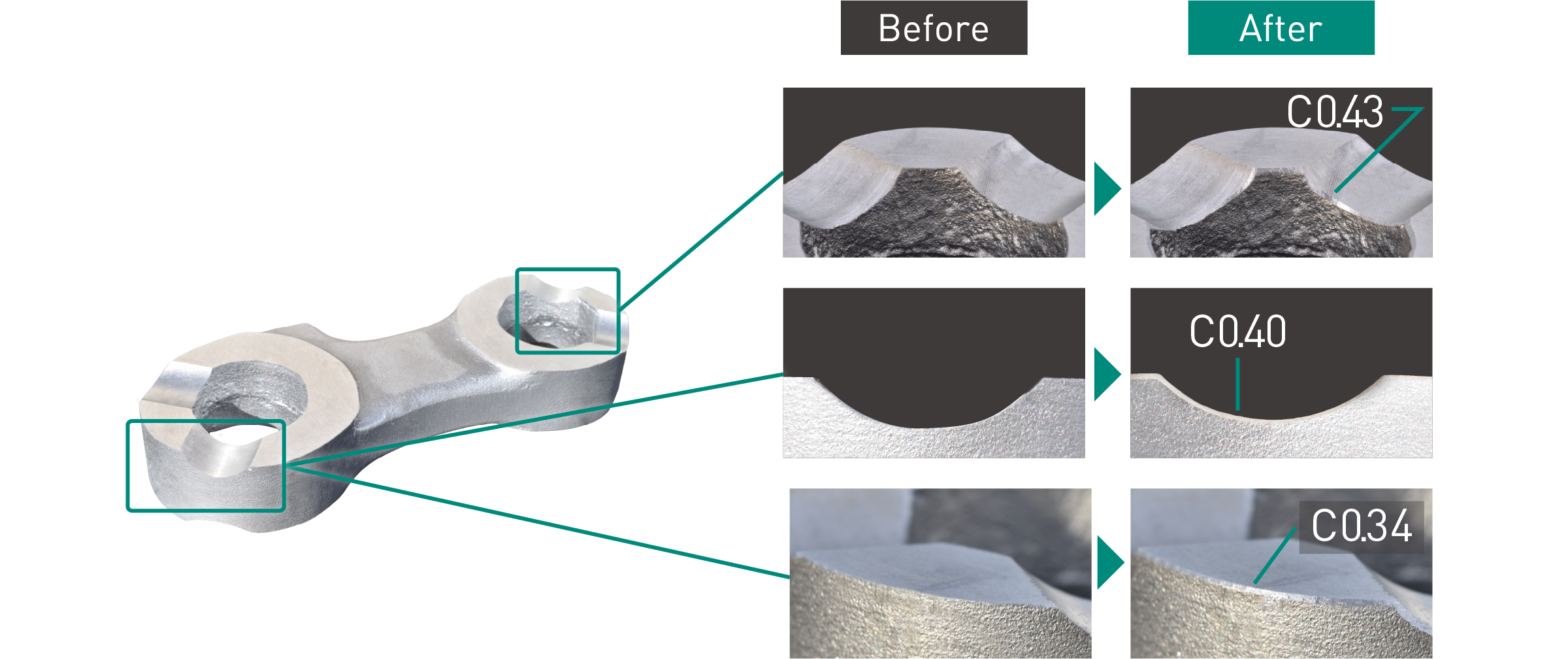
加工結果
- 面取り量:C0.4
- サイクルタイム:8秒/個
加工のポイント
Point1 : プログラムを単純化
「フローティング機構」によってツールがワーク形状に追従。2次元的な動作プログラムで3次元的な形状のバリ取りが可能に!
Point2 : プログラム補正が不要
伸縮型フローティング機構が寸法や形状のバラつきを吸収し均一に!
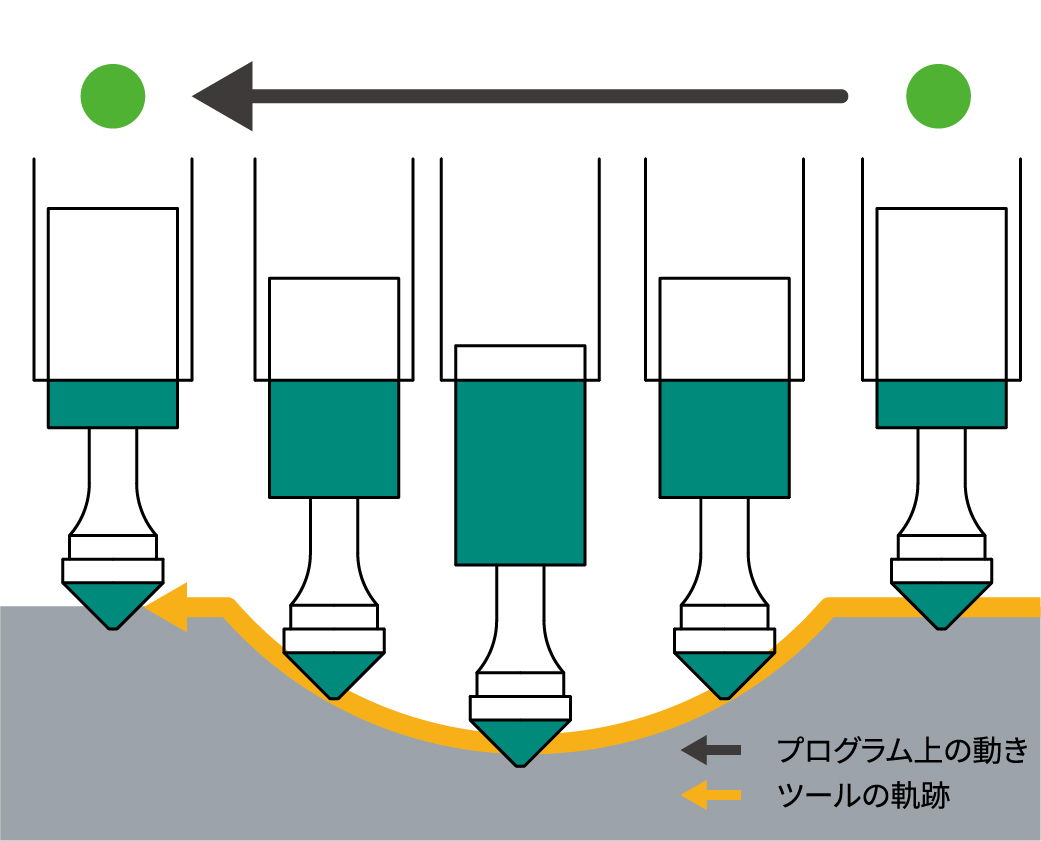
■ ツールの動作モデル図
加工動画
加工テスト受付中

スギノマシンではバリ取り研究所”デバラボ”にて、ロボットでバリ取り自動化を検討されているお客様からの加工テスト依頼を随時承っております。
適切なバリ取り自動化方法の選定から加工テストによる最適条件の見極めまで、専門的なノウハウが必要な部分を担います。
まずは以下リンクよりお気軽にご相談ください。