産業用ロボットとは。定義や種類別の特徴|ロボット選定
産業用ロボットは、主に工場での搬送・加工・組立・洗浄・バリ取り作業など、人間に代わって様々な作業の自動化を行うロボットのことを指します。産業ロボットともいわれます。
目次
1.産業用ロボットの定義
2.産業用ロボットの用途・活用分野
3.産業用ロボットの種類
4.CRbとは
1.産業用ロボットの定義
産業用ロボットは、JISや法律などでは、以下のように定義されています。
| JIS B 0134
定義1130 (ISO8373) |
3以上の軸をもち、自動制御によって動作し、再プログラム可能で多目的なマニピュレーション機能をもった機械。移動機能をもつものともたないものとがある。 |
| JIS B 8433-1 | 産業オートメーション用途に用いるため,位置が固定又は移動し,3 軸以上がプログラム可能で,自動制御され,再プログラム可能な多用途マニピュレータ(JIS B 0134:1998,定義 1130 の定義を修正) 注記 1 ロボットは,次を含む。 − マニピュレータ(アクチュエータを含む) − 教示ペンダントを含む制御システム,及び通信インタフェース(ハードウェア及びソフトウェア) 注記 2 ロボットは,ロボットコントローラによって制御されるあらゆる追加軸を含む。 注記 3 この規格では,次の装置は産業用ロボットとみなす。 a) ハンドガイドロボット b) 移動ロボットのマニピュレータ部分 c) 協働ロボット |
| 労働安全衛生法 | マニプレータおよび記憶装置(可変シーケンス制御装置および固定シーケンス制御装置を含む。)を有し、記憶装置の情報に基づきマニプレータの伸縮、屈伸、上下移動、左右移動もしくは旋回の動作またはこられの複合動作を自動的に行うことのできる機械(研究開発中のものその他厚生労働大臣が定めるものを除く) |
マニピュレータ(マニプレータ)は、産業用ロボットのアームのことです。人間の腕にあたる部分で、様々な作業を行います。
「サービスロボット」との違い
産業用ロボットとは別に、「サービスロボット」と呼ばれるロボットがあります。
受付や案内ロボットのような人型ロボットが主ですが、手術支援ロボット、レスキューロボット、パワーアシストなどもサービスロボットに含まれます。
産業用ロボットは工場などで人の作業を「代替」するのに対して、サービスロボットは人間が行う作業や動作を「支援」します。
スギノマシンのクローラ式小型作業ロボットも、人が入れない場所での作業を遠隔操作で行うため、サービスロボットに分類されます。

2.産業用ロボットの用途・活用分野
人手不足や、危険作業からの解放などで、作業の自動化ニーズは近年ますます高まっています。
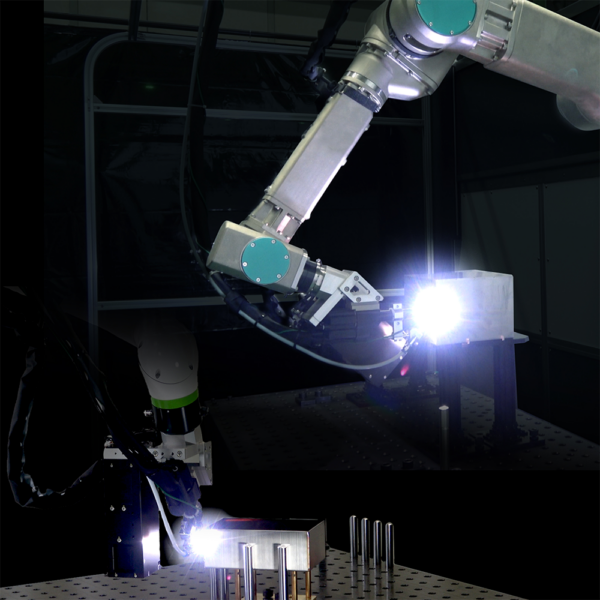
産業用ロボットは、加工、組立、溶接、搬送、検査などあらゆる作業の自動化に活用されており、自動車産業をはじめ、電気・電子デバイス産業、半導体産業、食品産業、農業など、多種多様な業界で導入されています。
一口に産業用ロボットといっても、その種類は様々です。
3.産業用ロボットの種類
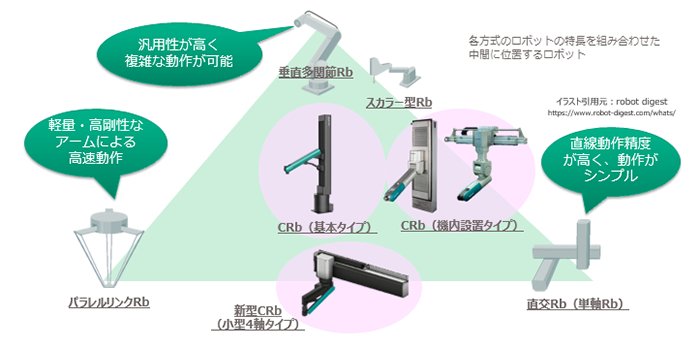
産業用ロボットは、それぞれの構造によって得意な動きや特徴があるため、目的や用途にあわせたロボットを選ぶことが大切です。
ここでは、ロボットの構造による分類を紹介します。
垂直多関節ロボット
汎用性が高く、様々な用途で使用されているロボットです。現在、最も使用されているロボットです。
7つの軸をもつといわれる人間の腕の動きに近く、自由度が高いため複雑な動作が可能です。
用途別の専用機種もあるため、バリエーションも豊富です。
一方で、動きの制御が複雑になる面もあります。
スカラロボット(水平多関節ロボット)
日本で開発されたロボットです。スカラ(SCARA)は、Selective Compliance Assembly Robot Armの略です。
平面で位置決め可能な2つの回転軸とアーム、上下方向は直線軸、ハンドの向きを調整する回転軸で構成されたものが一般的です。
真上からの作業が主で、組立が得意なロボットです。
パラレルリンクロボット
アーム質量当たりの剛性が高いため、軽くて剛性のあるアームです。
高速動作が得意で、主にピッキングの用途で使用されます。
直交ロボット(単軸ロボット)
単軸のロボットを複数組み合わせることによって必要な動作を実現したロボットです。
シンプルな構造で、安価なことが特徴です。
円筒座標ロボット
上下および前後の動作は直線軸で、全体を旋回する回転軸が一つあるロボットです。
スギノマシンの「CRb」はこの分類に含まれます。

極座標ロボット
アームを上下左右に回転させる回転軸をもち、アームが伸縮するロボットです。
世界初の産業用ロボットである米国ユニメーション社(世界初の産業用ロボット製造会社)「ユニメート」はこれに含まれます。
スギノマシンでも、同様のロボットを1969年に開発しており、エア駆動ロボット「サブマン」として発表していました。
協働ロボット
構造による分類とは別に、近年では「協働ロボット」と呼ばれる産業用ロボットが登場しています。
一般的な産業用ロボットは、安全柵やセーフティ機器が必要ですが、協働ロボットは、人や物に触れると停止するなど、安全性が高く、人と同じ空間で作業が可能なロボットです。
人と協業でき、柔軟な作業が可能な一方で、出力の制限などから重量物の運搬や剛性の求められる加工などの作業は苦手な面があります。
4.CRbとは
「CRb」は、スギノマシンが自社開発した産業用ロボットで、構造上は円筒座標ロボットに分類されます。
コラムに連結されたアームが開閉および旋回する、6軸駆動や4軸駆動のロボットです。
垂直多関節ロボットに近い自由度、汎用性をもちながら、直動軸をベースにアームの上下・前後移動を行うため、剛性が高く、精度よく直線を移動させることができます。
構造上、アームが本体より後ろに飛び出さないため、狭いスペースでの作業にも向いています。
人間一人分のスペースなど、狭いエリアでの作業の自動化に活用できます。