CRb - Connected Robot
ロボットや工場自動化の総合提案
CRb - Connected Robot
ロボットや工場自動化の総合提案


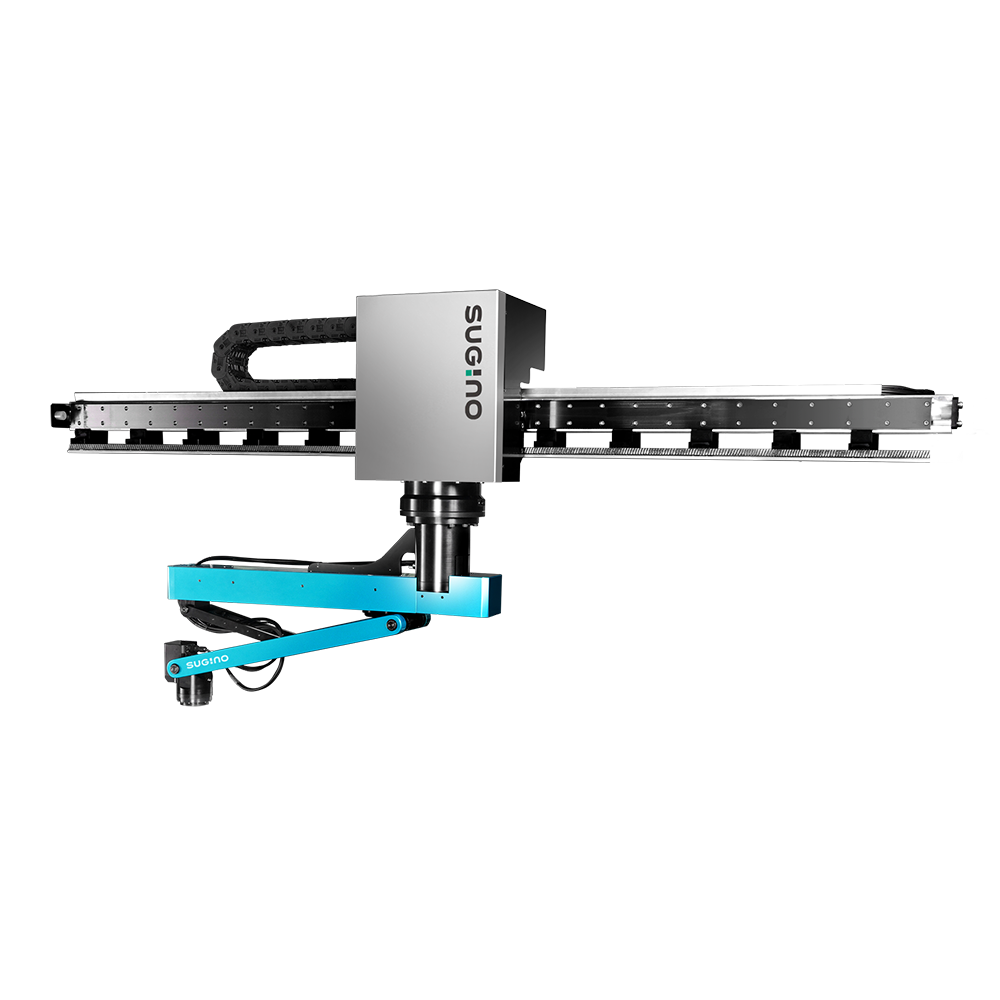
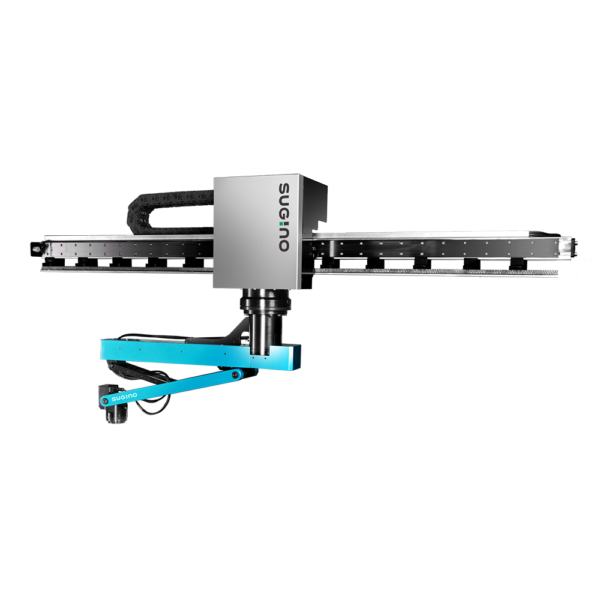
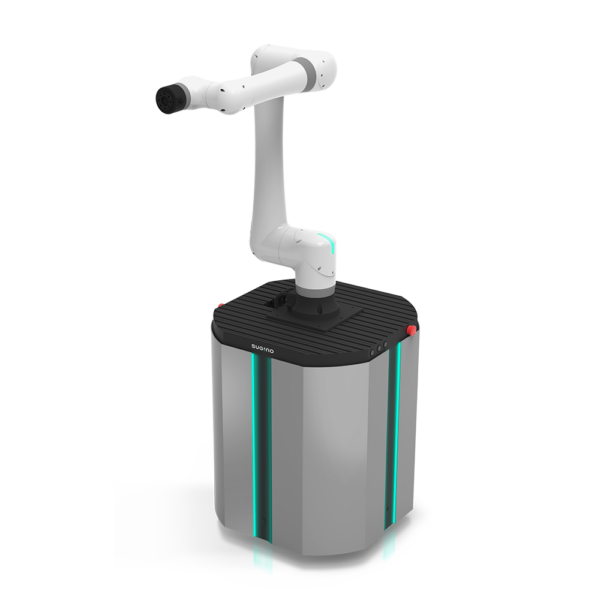
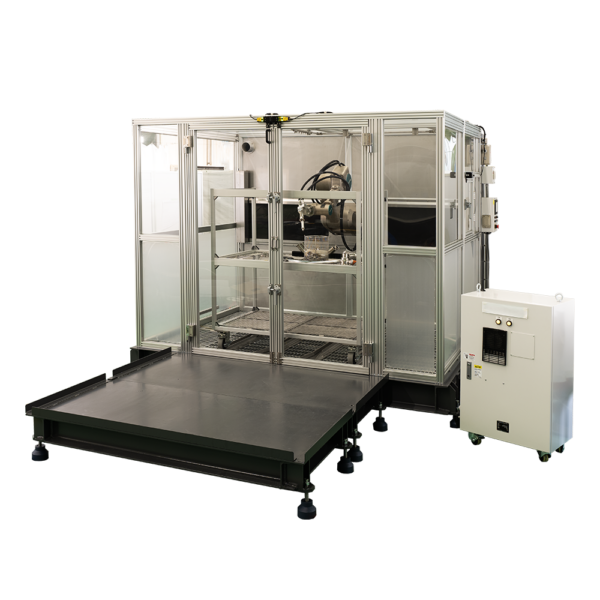
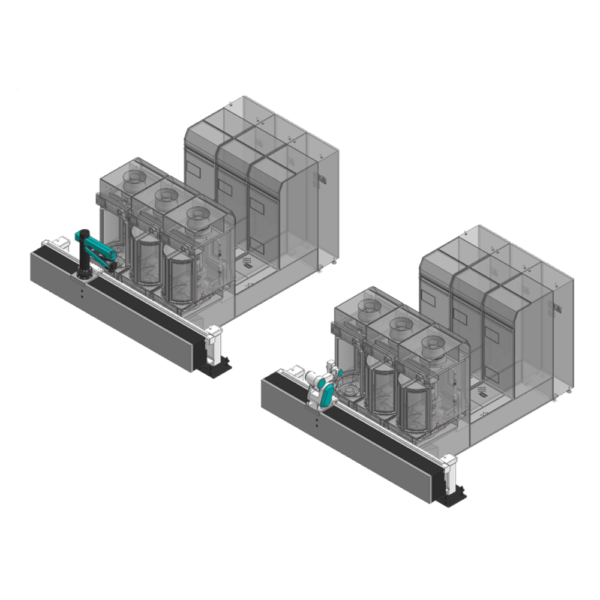
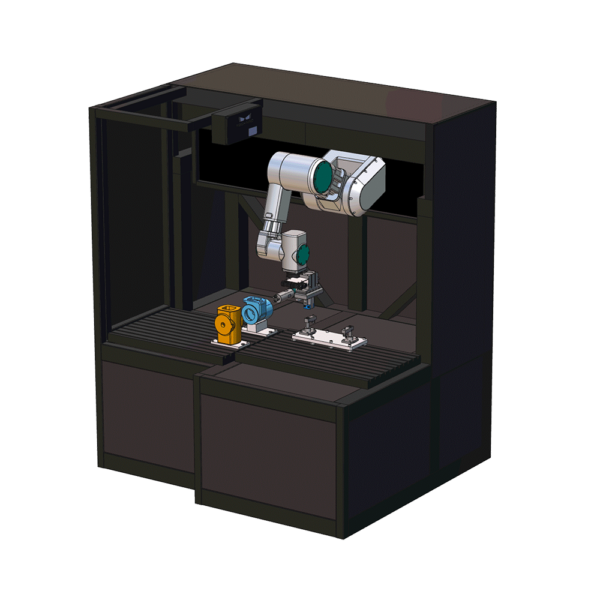
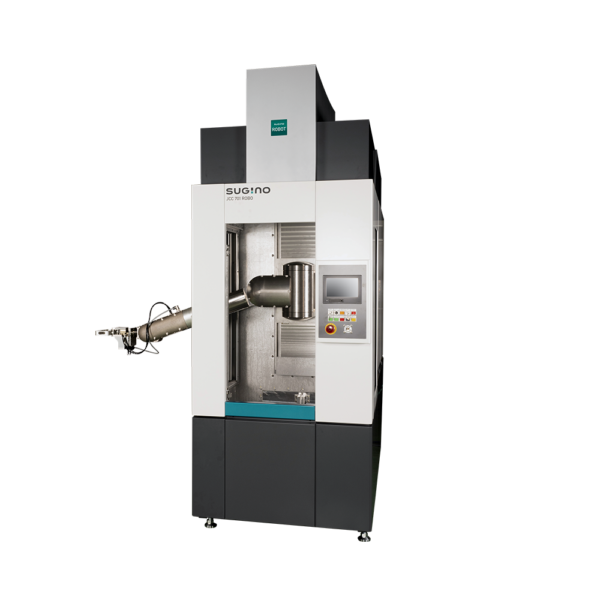
狭い空間に設置し、稼働できるスリムな構造で工程間や各装置間を繋ぐ産業用ロボットです。
省スペースで、剛性が高く、優れた直進性と高い位置決め精度が特徴です。