【技術コラム】ロボットバリ取りシステムを導入するまでの流れ【ロボットバリ取り#03】

製造業では人手不足により、手作業が主流だったバリ取りに自動化のニーズが高まっています。
産業用ロボットや協働ロボットで簡単に自動化できると思われがちですが、実は非常に専門的なノウハウが求められます。
今回は、ロボットバリ取りシステムを導入するまでの流れについて説明します。
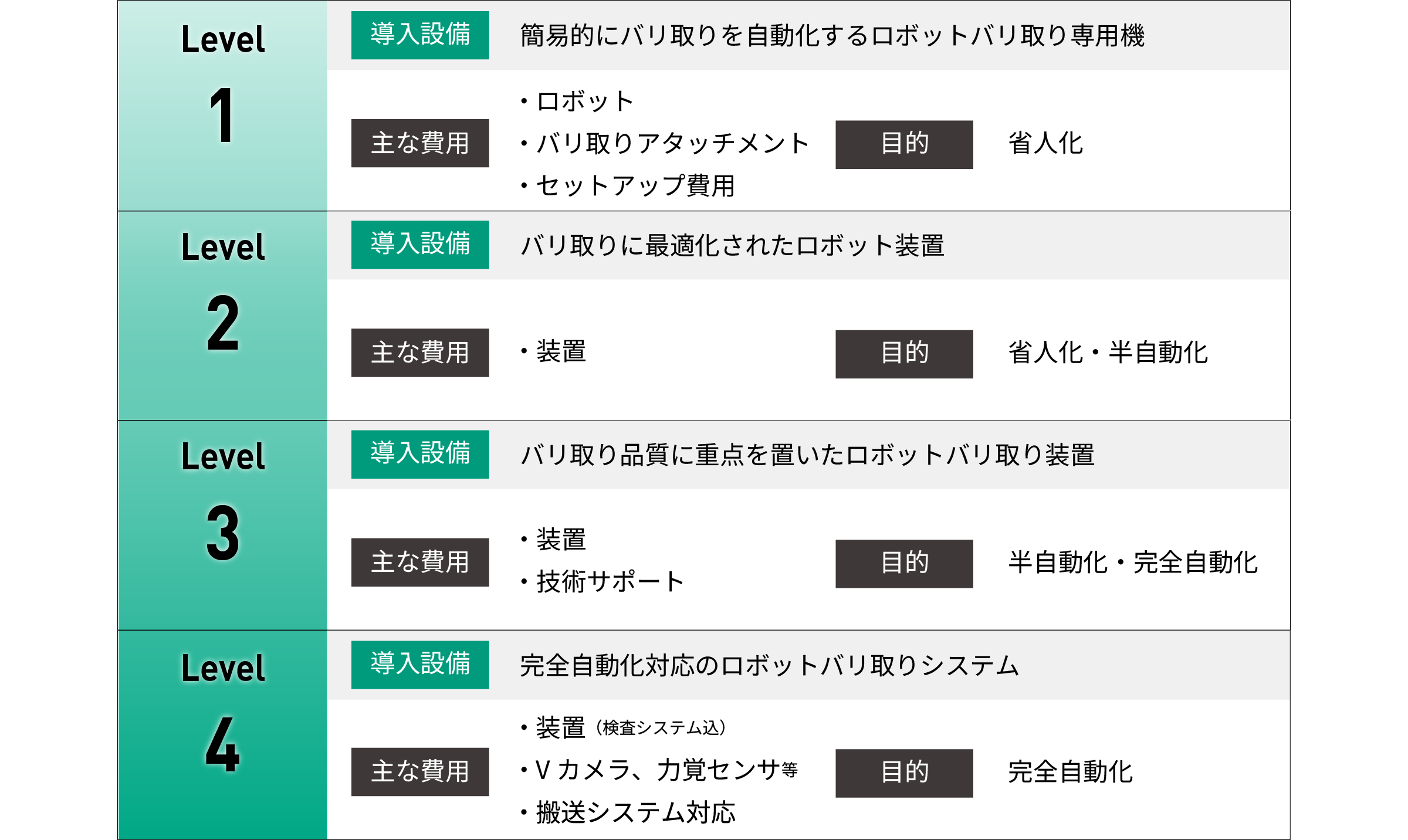
STEP1 目的に合った自動化レベルの検討
搬送を含めた完全自動化を目指すか、作業軽減のための半自動化や省人化を目指すのかによって、難易度や検討する設備構成が大きく変化します。バリ取りの難易度、実現可能性、費用対効果等を十分に考慮したうえで、目的に合ったシステム導入をしましょう。
STEP2 現状のバリ取り診断
バリ取りの難易度、実現可能性、費用対効果を推し量るには、現状のバリ取りを診断する必要があります。
重点的に診断が必要なのは、以下になります。
- 現在のバリ取り工法と使用工具が自動化に適しているか?
- 現在の方法における問題点が自動化で改善できるか?
- 合格の判断基準を明確にできるかどうか?

STEP3 合格基準の数値化・明確化
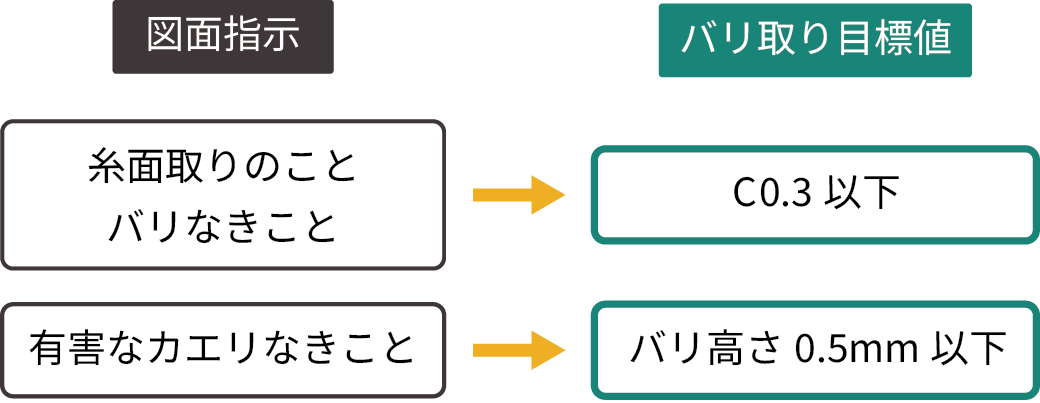
「バリなきこと」「糸面取りのこと」といった曖昧な合格基準では、人や状況によって合格基準が変わってしまう場合があります。
結果、過剰品質となりコストが増大し、ロボットバリ取りの検討を断念する大きな要因となります。
合格基準を明確にすることで、適正な価格で必要十分な機能や性能をもったシステムとすることができます。
STEP4 加工テストの実施

ロボットによるバリ取りの自動化においては、手作業と同じ工具を使えないケースも多々あります。
自動化に適した工具へ置き換えると、従来とはバリ取りの品質や見た目が変化します。
そこで、品質をクリアできることを確認する事前の加工テストは必須となります。
テストを成功させるには、目的に応じたバリ取り工具・機器を選定する知識や、ロボットの特性を理解したオペレーションが必要になります。

STEP5 装置の仕様検討
テストを行い目的を達成できることが確認できたら、装置メーカーや自社の設備部門と詳細な仕様を決定します。
検討の際には、以下の項目について十分考慮が必要です。
- テスト結果の再現性
- 量産時におけるバリの大きさやワーク寸法のバラつきへの対応

ロボットバリ取り、共にチャレンジしませんか?
スギノマシンではバリ取り研究所「デバラボ」を開所しました。
デバラボは、人手不足や品質の向上、危険作業の廃止を目的にニーズが高まっている「バリ取り自動化」を研究しています。
ウォータージェットやフローティング機構を用いた特殊で高度なバリ取り技術や、バリの発生から考えるバリ制御、それらに関する商品開発やテスト機能を一箇所に集約した場所です。
皆さまが抱えるバリ取りの問題を、技術交流や加工テストを通じて共有し、共に考え、問題解決を目指します。
ロボットバリ取り、共にチャレンジしませんか?